In the 1970’s and much of the 80’s, passengers on commercial aircraft would occasionally experience the joy of the ‘holding pattern’. Having their plane stacked with other planes circling in a spiral due to a delay at a destination airport. Planes would circle sometimes for hours, with priority given to those about to run out of fuel.
Then in 1981 the FAA used a ground delay program (GDP) for the first time during an air traffic controllers strike. The advantage of keeping airplanes on the ground at their departure airport was immediately obvious: passengers are just as unhappy, but they’re safer and the aircraft isn’t burning fuel at 161 lbs per minute (or 73kg per minute for the 767) in a holding pattern. Today the ground delay program is run by the Air Traffic Control System Command Center, in Warrenton, Virginia which coordinates commercial flights around the USA and Canada and implements a GDP for destination airports if their arrival rate drops below a threshold.
The FAA is catching a lot of heat for their delay in implementing UAV (or drone) legislation. The drone pilot part of me sympathizes with the public and I think what is particularly frustrating is that a small handful of commercial operators have actually been granted licenses to operate giving them an unfair advantage over other operators. The article in the Denver Post today probably stung a bit among unlicensed operators when one of the already-licensed operators described the FAA’s pace as “about where it should be”. Sure, it works for them.
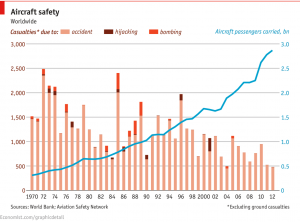
But the private pilot part of me – and the aviation history enthusiast part of me is sympathetic towards the FAA’s plight. Make no mistake, I think we should bringing as much public pressure to bear on them as we can. In the legislative environment we’ve inherited that’s the only way anything will get done. But this country has a long and storied history in traditional aviation and we have achieved a remarkable improvement in safety by creating well engineered solutions for specific problems. A glance at the chart below showing safety from the 70’s until 2012 illustrates that. [Source: The Economist on air safety and MH370]
The FAA is not asleep at the switch – they are continuing to innovate and improve safety and efficiency with the rollout of the Next Generation Air Transport System which started in 2012 and is due to complete in 2025. Part of this rollout was support for ADS-B which is just about complete. This remarkable system gives everyone including hobby pilots like you and I the ability to buy an $800 transceiver, attach it to our iPAD and get real-time traffic and weather data as we fly anywhere in the USA while sharing our own position with other pilots and air traffic control. Previously you had to buy expensive avionics systems and a subscription to a commercial provider’s satellite feed.
Unfortunately we are stuck, while we wait for formal FAA legislation, using an FAA advisory circular (91-57) that applies to radio control model aircraft as our legislative guide. It says, don’t fly near populated areas, don’t operate near spectators until you’re sure your aircraft works, don’t fly above 400ft, don’t fly near an airport without notifying them, give way to full scale aircraft, ask the FAA for help if you need it.
Comparing a model aircraft to a drone is like comparing the Wright Flyer to a 767. One has wings and an engine. The other has GPS, avionics, autopilot, gyros, accelerometers, real-time ground station connectivity, real-time logging for later analysis and flight modes ranging from fully-autonomous to the pilot having an advisory role with the computer taking over when needed – to fully manual. (I am comparing most newer commercial long range aircraft with the IRIS+ by 3DRobotics for $750).
Most drone innovators are very excited by the prospect of being able to fly their aircraft out of sight autonomously. Whether it’s Amazon wanting to do package delivery, a survey company wanting to offer services to farmers or me wanting to deliver beer to my friend a few blocks away. Autonomous flight is the most useful aspect of drones and they are very very good at it. I can go outside right now and get my IRIS+ to fly 3 miles away at 390 feet, descend to 60 feet, point the camera on gimbal at my friend’s house, circle the house in a smooth spline navigation path as it films the home, ascend back to 390 and return to me and I can get telemetry via an excellent 900 mhz transceiver from the drone the whole way and even take over manual control if I feel the need. But that’s not allowed because the FAA won’t let us fly out of sight until they make laws which may simply formalize the fact that hobby drones can’t fly out of sight.
The USA is filled with tech innovators that are salivating at the prospect of trying out new things with drones – things that may drastically improve our quality of life and safety. I’m reminded of the horrific King5 news chopper crash a few years ago in Seattle which killed 2 and burned a third victim. Today that job can be done by a drone costing under $2000 – filmed in 4K video, gimbal stabilized with real-time first person view as film is being shot. With an amateur radio FCC license the operator can legally boost the drone telemetry and video signal from 0.2 watts to 10 watts with a high gain antenna and increase range to the point where battery life is the only issue.
But autonomous flight innovation of that kind is banned and the only laws we have to guide us right now are an advisory circular relating to model aircraft and public statements by the FAA. Some operators are saying “to hell with it, we’re flying” as is the case with Texas EquuSearch. The search and rescue operator was issued a warning by the FAA, they then turned around and sued the FAA and a federal court threw out the case saying that the email the FAA sent EquuSearch did “not represent the consummation of the agency’s decision making process, nor did it give rise to any legal consequences.”. EquuSearch have interpreted this as the FAA having no jurisdiction and so they have decided to continue flying.
In my view the FAA must be very careful to not treat drones like manned aircraft because they risk band-aiding the situation and crippling innovation. They need to look at the modern air space systems and innovations that have worked there and then assess drones as unique and completely different entities that happen to exist within their jurisdiction. I think giving everyone from hobbyists to commercial and government operators the ability to perform out-of-sight autonomous flights is a very important and necessary goal if they are to be an enabler of innovation rather than being a crippling force that ensures we aren’t competitive in this new arena of aerospace.
It is essential that this country (the USA) maintains its dominance in aerospace and we worked incredibly hard to get to where we are today – from the Wright Flyer to breaking the sound barrier, to getting our asses kicked by the Soviets when they made it to space first, but we regained the lead by getting to the Moon first. Then on to Stealth technology and military UAV’s. We’ve managed to stay out in front. To do this we need to enable the private sector to conduct research into autonomous flight and the private sector includes individuals and small groups of entrepreneurs. We need to enable them and we need to do it as fast as possible.
To allow autonomous flight I would propose a system similar to DUATS which pilots today use to file flight plans. The FAA should create a system whereby drone operators at defined levels of competence and commerciality are able to file a flight plan before flight. The plan would include waypoints with latitude, longitude and altitude. The flight plan would be filed an hour before flight and define a window for the flight. It would also be approved on the spot or rejected due to a conflict with another plan, temporary flight restrictions (TFR’s) or an airspace conflict.
I would suggest that a system like this could be used for autonomous flights under 400 ft in open areas. With additional licensing operators should be able to enter our national airspace system which starts at 500ft and this may include additional equipment like an ADS-B transceiver. And with further licensing, as with the current pilot requirement of an instrument rating, pilots may be able to complete autonomous flights above 18,000 feet.
To truly enable innovation in autonomous flight, the FAA can’t simply bandaid the existing system. They need to be an enabler and create new products and services to support drone operators and ensure that, as we have with manned aircraft systems, innovators are able to improve safety, efficiency and quality of life with unmanned aircraft.









